



Объединение «Дальняя связь» - филиала АО "Казахтелеком" 27.04.2021
Подрядчик располагает необходимым производственным потенциалом, оснащен
всей необходимой для выполнения специализированных строительно-
монтажных работ техникой, высококвалифицированными рабочими кадрами,
инженерно- техническими специалистами с большим опытом работы,
использует современные технологии в области монтажа линейно-кабельных
сооружений связи. 


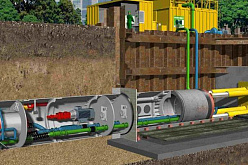

Способы локации и зондирования подземного пространства
При реализации работ по бестраншейной технологии горизонтального (наклонного) направленного бурения необходимо точно определять место нахождения (координаты) буровых головок в массиве грунта, иметь возможность управлять ими, а также обладать точными сведениями о расположении подземных объектов вдоль будущей трассы для исключения случайного повреждения инженерных коммуникаций.
В практике бестраншейного строительства трубопроводов применяют электромагнитный и кабельный способы локации, которые позволяют получить следующие данные о состоянии процесса: угол уклона (отклонение от трассы бурения); направление уклона (отклонение от магнитного или географического севера, т.е. азимут); положение буровой головки (отклонение вниз или вверх); глубину трассы, а также характеристики грунта и тем пературу окружающей среды.
Для зондирования подземного пространства используются радары, с помощью которых составляются подробные электронные карты участков будущего строительства трубопроводов. Оператор локационной установки должен интерпретировать полученные данные и корректировать параметры процесса, а оператор радарной установки — составлять полную и точную картину расположения подземных коммуникаций и распознавать их.
Системы электромагнитной локации включают передатчик, встроенный в корпус буровой головки и распространяющий электромагнитные импульсы определенной частоты, а также приемник, расположенный на поверхности земли. Питание приемника может осуществляться от батарей или электрического кабеля. Принцип измерения сигналов базируется на передаче коротких импульсов под землю через антенну, находящуюся на поверхности. Посланные электромагнитные волны отражаются и преломляются на границе различных материалов или слоев. На принимающей антенне замеряются амплитуда и время прохода сигнала. Контроль эффективной работы системы «передача—прием» состоит в получении максимального уровня сигнала. Такой сигнал получается в том случае, если приемник расположен строго над передатчиком в период бурения. Уменьшение сигнала означает уход буровой головки от проектируемой трассы, что требует корректировки направления движения.
Необходимо отметить, что для успешного контроля с помощью способа электромагнитной локации перед началом бурения следует изучить профиль местности и регулярно проводить калибровку передатчика и приемника. На эффективность работы системы локации, т.е. получение достоверных данных, влияют глубина трассы, проходимость грунта, воздействие посторонних электромагнитных полей, интенсивность сигнала и т.д. Как правило, чем плотнее грунт, тем сильнее помехи и слабее сигнал, который еще более снижается при увеличении глубины залегания буровой головки от поверхности земли. Влияние посторонних электромагнитных полей может существенно исказить данные о прохождении процесса бурения, но только в том случае, если посторонние поля превосходят по мощности излучение передатчика.
При кабельном способе локации измеряющий сигналы механизм монтируется непосредственно за буровой головкой и все данные о ситуации на трассе передаются по специальному кабелю, который протягивается через каждую наращиваемую во время процесса штангу, Наружный конец кабеля подключен к блоку управления, где установлен компьютер, который обрабатывает полученные данные.
Локационные системы для контроля процесса бурения могут также использоваться для нахождения в подземном пространстве затерянных кабелей и трубопроводов и определения глубины их залегания, что очень важно на начальной стадии работ по бестраншейной прокладке трубопроводов для снижения риска столкновения с нежелательными объектами на трассе и их случайных повреждений в период проведения строительных работ.
В Западной Европе широкое распространение получила колесная установка подземного зондирования Pipe Hawk GPR . С помощью данной установки можно точно определить место расположения инженерных сетей, залегающих на глубине до 2 м, и идентифицировать материал коммуникаций (пластик, бетон, керамика, оптико-волоконные кабели и т.д.).Система питается от аккумулятора, что повышает ее мобильность и удобство использования, и может работать без остановки движения транспорта, как это обычно происходит при традиционных методах выборочного вскрытия проезжей части.
Количество показов: 1234
Материалы по теме:
Посмотрите наши проекты:


















