



Объединение «Дальняя связь» - филиала АО "Казахтелеком" 27.04.2021
Подрядчик располагает необходимым производственным потенциалом, оснащен
всей необходимой для выполнения специализированных строительно-
монтажных работ техникой, высококвалифицированными рабочими кадрами,
инженерно- техническими специалистами с большим опытом работы,
использует современные технологии в области монтажа линейно-кабельных
сооружений связи. 


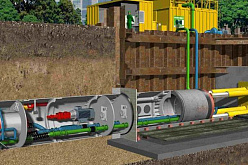
Стоит ли доверять системам локации ГНБ
Ни одна установка горизонтального бурения не обходится без точной локационной системы, которая позволяет отслеживать процесс бурения «от» и «до». Однако у некоторых заказчиков все еще остаются опасения насчет надежности метода, так как прямого зрительного контакта с буровым оборудованием, находящимся в грунте, нет. В этой статье мы опишем алгоритм работы локационных систем при горизонтально-направленном бурении, чтобы развеять опасения.
Системы локации созданы в конце 80-ых годов с целью контроля процесса бурения, сегодня они максимально удобны для эксплуатации, и выполняют следующие функции:
- отслеживание местоположения и перемещений буровой головки;
- отслеживание температурного режима буровой головки;
- определение необходимой глубины заземления буровой головки.

Каждая локационная система состоит трех ключевых элементов:
- Зонд - это излучатель, встроенный в буровую головку. Он подает сигналы, которые принимает локатор. Зонд фиксирует положение буровой головки в грунте – глубину, угол наклона и угол поворота, а также её температуру и другие параметры.
- Приемник - локатор ГНБ, обрабатывает поступающую от зонда информацию, преобразует в удобочитаемый формат, и выводит на дисплей. Оператор локационной установки (локаторщик) сопровождает буровую головку на всем пути и видит информацию на экране локатора. Оператор буровой машины видит эту же информацию на экране-повторителе, таким образом информация транслируется для двух экранов: оператору локационной установки(локаторщику) и оператору буровой установки.
- Между локаторщиком и оператором установки ГНБ организуется радиосвязь при помощи раций. Именно оператор локационной установки по радиосвязи подает команды оператору ГНБ. Оператор ГНБ в свою очередь выполняет его команды и корректирует движение бурового инструмента, угол наклона и угол поворота, если это необходимо. Он также видит все изменения фактического положения буровой головки на экране-повторителе.
Таким образом, установленный в буровую головку зонд передает информацию о своем местоположении, также фиксирует глубину, угол наклона и угол поворота, температуру и другие параметры. Сигнал принимается наземным локатором, после чего информация преобразуется в удобочитаемый формат и передается на два дисплея: дисплей приемника и экран-повторитель.
Оператор локационной установки сопровождает буровую головку и видит информацию на экране локатора. Оператор буровой машины видит эту же информацию на экране-повторителе. Между локаторщиком и оператором установки ГНБ организуется радиосвязь при помощи раций. Именно локаторщик руководит процессом, он подает команды оператору ГНБ, о том какие действия тот должен выполнять (на какой угол повернуть буровую головку, бурить с вращением или задавливать штанги и т.д.) Он оперативно корректирует направление буровой головки согласно указаниям. В случае отклонения головки от проектного направления, оператор ГНБ изменяет траекторию движения бура, минуя подземные препятствия, чтобы избежать столкновения с подземными коммуникациями: трубопроводами -газо, -водо и нефтепроводами, коллекторами, телефонными линиями и т.д. Операция бурения пилотной скважины завершается выходом буровой головки в установленном месте.
С появлением Локационных систем процесс бурения стал полностью контролируемым и безопасным. В этой статье мы рассказали о последовательности функционирования системы локации. Надеемся, что теперь Вы можете более ясно представить себе все этапы отслеживания бурения. Заметим, что отслеживание буровой головки при прокладке коммуникации не единственный геолокационный процесс в практике ГНБ: установки тепловизора используются на предыдущих этапах работы ГНБ, например, на этапе изучения почвы и геодезических работах.
На сегодняшний день существует как минимум десяток локационных систем разных фирм для ГНБ, каждая из них имеет как преимущества, так и недостатки.
Количество показов: 976
Материалы по теме:
Посмотрите наши проекты:


















